– By Md. Hasan Habib, System Engineer (Muspana)
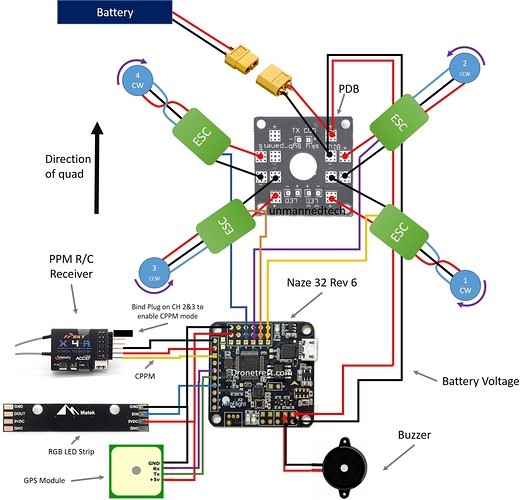
A drone, formally known as an Unmanned Aerial Vehicle (UAV), is an aircraft that operates without a pilot onboard and is controlled remotely or through onboard automation. Modern multirotor drones rely on electric motors, sensors, and a flight controller to maintain stable and precise flight through continuous real-time feedback.
In today’s article, we explain the core components of a multirotor drone and how each part works together to achieve controlled, efficient, and reliable flight.
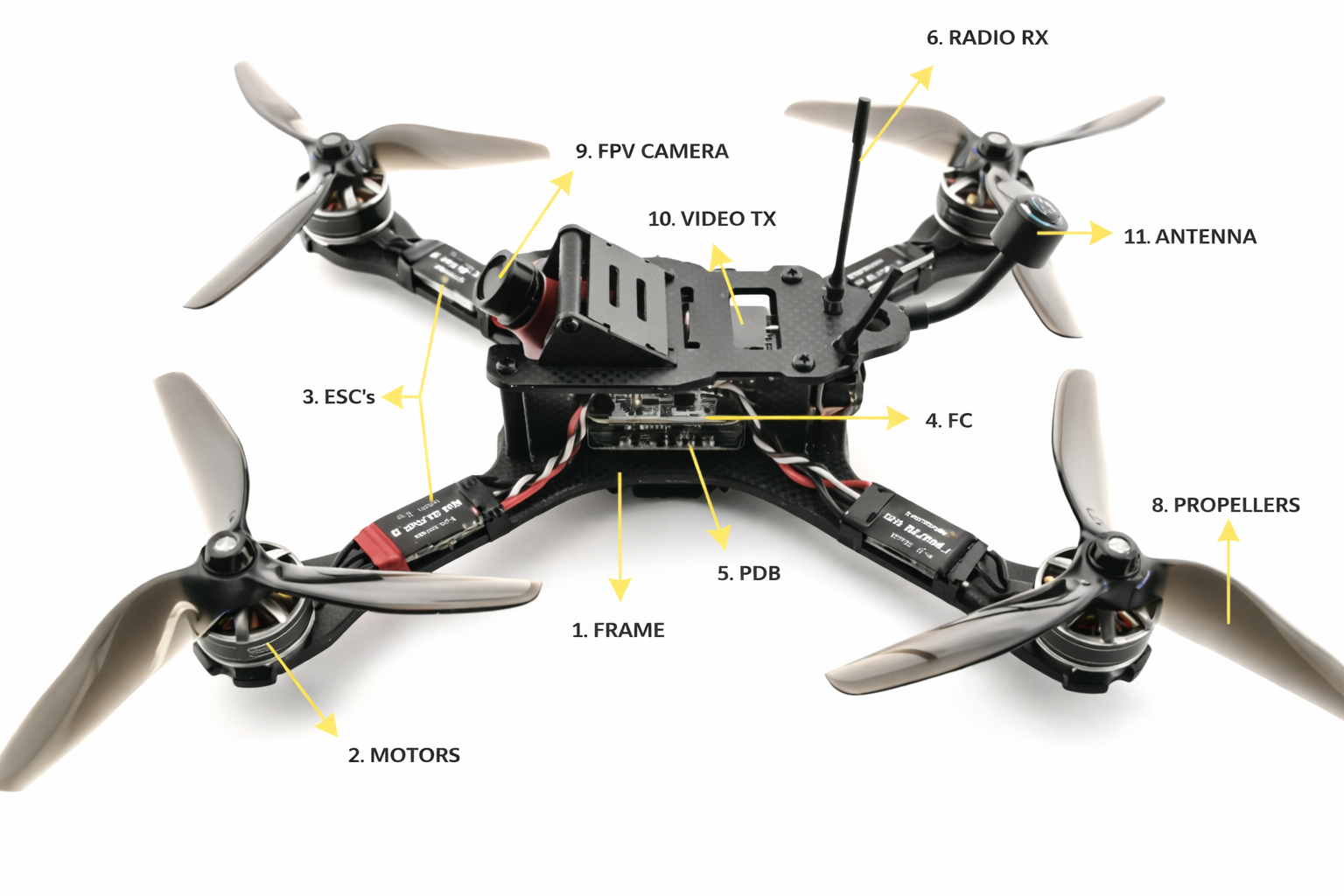
Components of Drone
- Frame
- Motor
- Propellers
- ESCs
- Battery
- PDB
- Flight Controller (FC)
- Sensors (IMU & Navigation Sensors)
- Communication System (RC & Telemetry)
- Payload (Mission Equipment)
1. Frame (Airframe)
Purpose: The frame is the structural backbone of the drone. It holds all components in correct position and alignment.
Key Functions
- Supports motors, electronics, battery, and payload
- Maintains geometry for stable flight
- Absorbs vibration and minor impacts
Typical Features
- Lightweight and rigid
- Made from carbon fiber, aluminum, or reinforced plastic
- Designed in X, H, or circular layouts
Why it matters
Frame stiffness and balance directly affect flight stability, vibration levels, and payload capacity.

2. Motors (Brushless DC Motors)
Purpose: Motors generate rotational force to spin the propellers.
Key Functions
- Convert electrical energy into mechanical rotation
- Produce thrust needed for lift and maneuvering
Important Features
- Brushless DC type (high efficiency, long life)
- KV rating (RPM per volt)
- High torque-to-weight ratio
Why it matters
Motor selection determines lifting power, efficiency, and flight time.

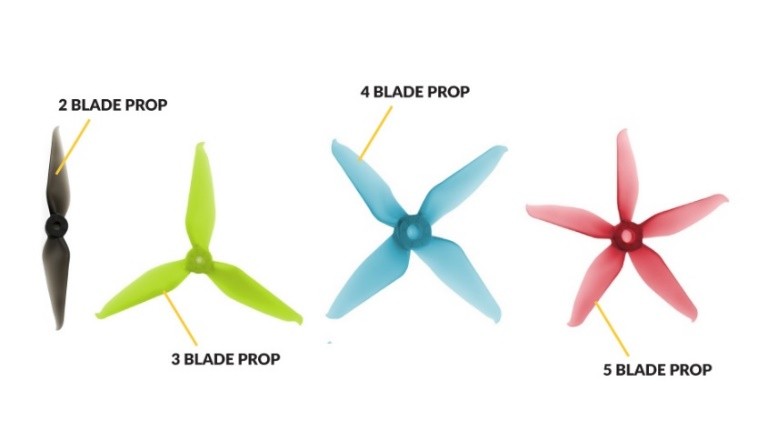
3. Propellers
Purpose: Propellers convert motor rotation into lift and thrust.
Key Functions
- Push air downward to lift the drone
- Control movement direction when motor speeds vary
Important Features
- Diameter (affects lift)
- Pitch (affects thrust and efficiency)
- Material (plastic or carbon fiber)
Why it matters
Inappropriate correct propeller choice leads to poor efficiency, vibration, and motor overload.
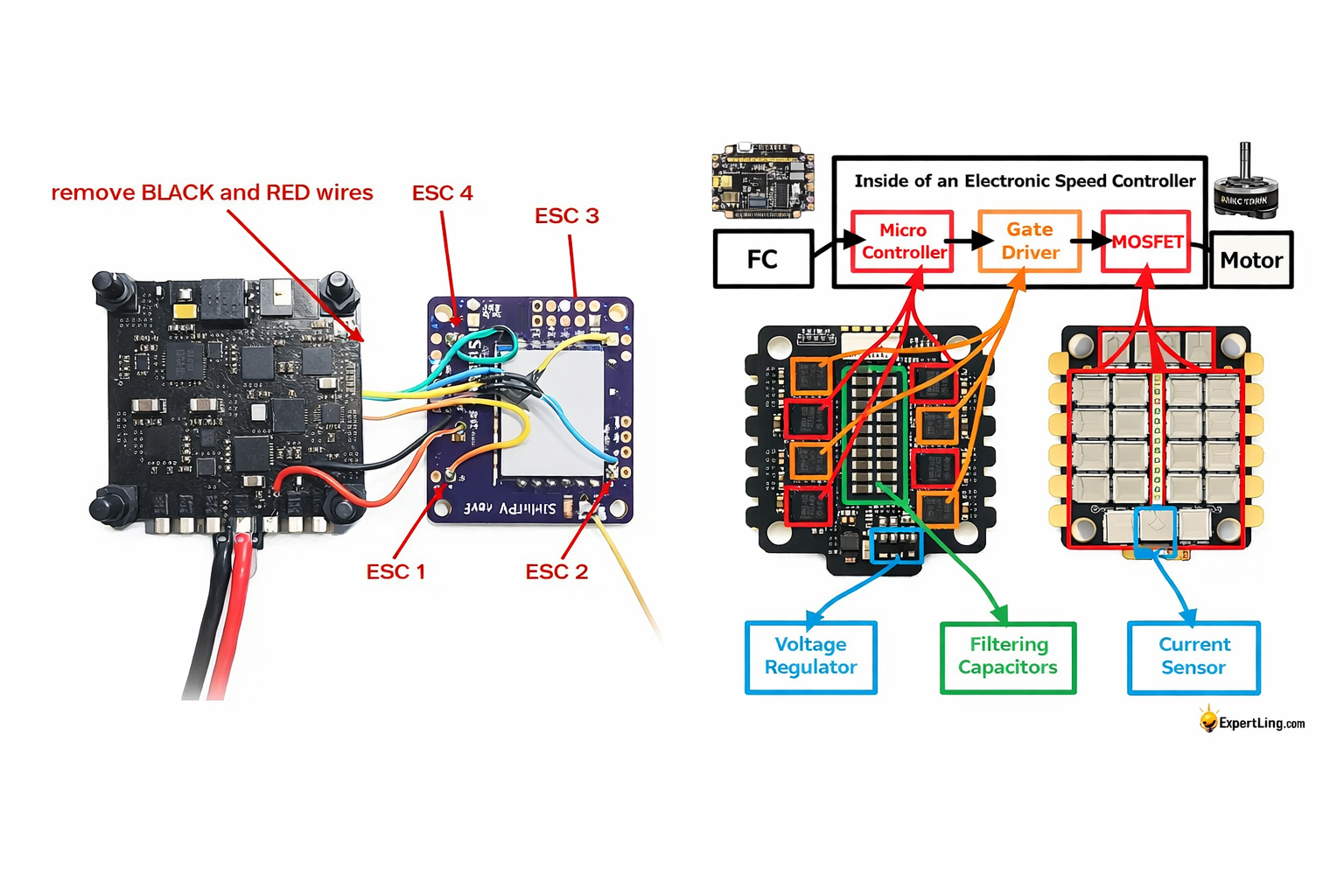
4. Electronic Speed Controllers (ESCs)
Purpose: ESCs control how fast each motor spins.
Key Functions
- Receive commands from the flight controller
- Regulate motor speed precisely
- Enable rapid thrust changes for stability
Important Features
- Fast response
- Current and temperature protection
- Digital control protocols (e.g., DShot, PWM)
Why it matters
ESC response speed directly affects flight smoothness and stability.
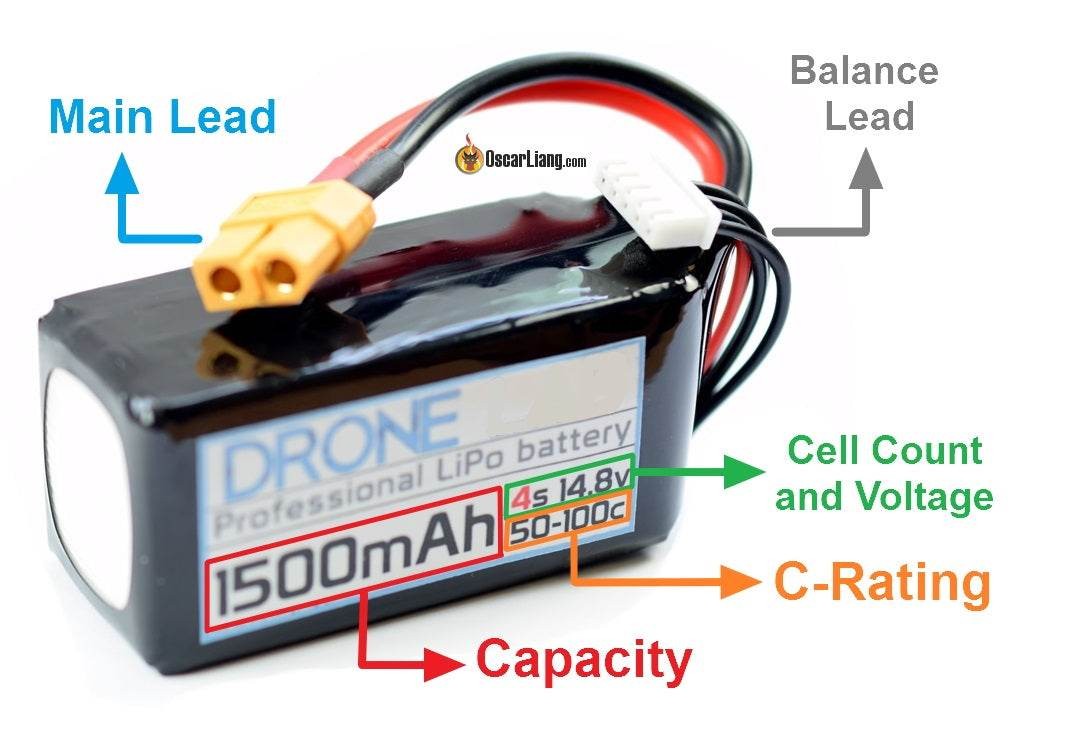
5. Battery (Power Source)
Purpose: Provides electrical energy to motors and electronics.
Key Functions
- Deliver high current instantly
- Sustain flight for required duration
Important Features
- Lithium-Polymer (Li-Po) chemistry
- Voltage (cell count: 3S, 4S, 6S, etc.)
- Capacity (mAh) and discharge rate (C-rating)
Why it matters
Battery quality affects flight time, safety, and power stability.
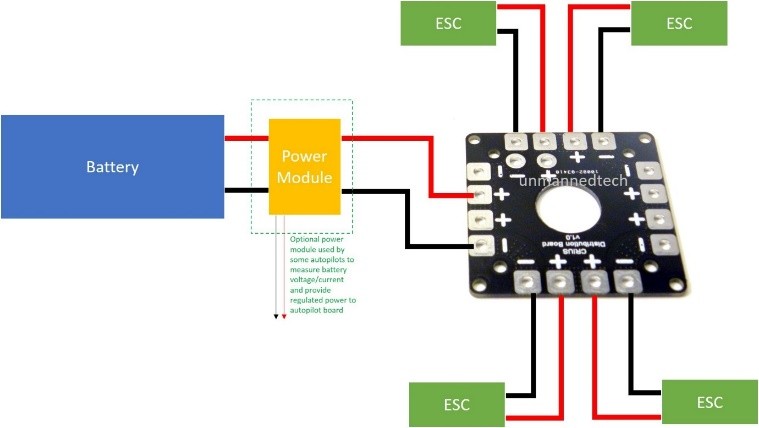
6. Power Distribution Board (PDB)
Purpose: Distributes power from the battery to all electronic components.
Key Functions
- Supplies power to ESCs
- Provides regulated voltage for controllers and sensors
Important Features
- Current handling capability
- Integrated voltage regulators (in some designs)
Why it matters
Ensures safe and stable power delivery across the drone.
7. Flight Controller (FC)
Purpose: Central brain of the drone.
Key Functions
- Reads sensor data
- Calculates orientation and corrections
- Sends speed commands to ESCs
Important Features
- High-speed processor
- Integrated sensors (IMU)
- Firmware support (PX4, ArduPilot, Betaflight, etc.)
Why it matters
Without the flight controller, the drone cannot stabilize or fly.
8. Sensors (IMU & Navigation Sensors)
Purpose: Provide real-time information about the drone’s movement and position.
Common Sensors
- Gyroscope → rotation
- Accelerometer → tilt and acceleration
- Magnetometer → heading
- Barometer → altitude
- GPS → position and speed
Why it matters
Sensors allow the drone to understand its orientation and location.

9. Communication System (RC & Telemetry)
Purpose: Enable communication between the drone and the operator.
Key Components
- Radio receiver (pilot commands)
- Telemetry module (status data)
- Antennas
Why it matters
Reliable communication ensures safe control and monitoring.

10. Payload (Mission Equipment)
Purpose: Payload defines what the drone is used for.
Common Payloads
- Cameras (RGB, thermal)
- Sprayers (agriculture)
- Sensors (LiDAR, multispectral)
Why it matters
Payload weight and type influence motor choice, battery size, and flight performance.

A multirotor drone is an integrated system of carefully matched components, where each part performs a specific and essential function. Understanding how these components work together helps users select the right drone, identify and diagnose faults, operate the system safely, and plan effective upgrades with confidence.